Робот паук arduino своими руками - Робот своими руками. Часть 3

Инструкция по сборке робота паука. Часть 1.
В ходе данного курса обучающиеся изучают робота Танка. Каждый ребенок научится программировать передвижную платформу с использованием моторов постоянного тока и другого электронного оборудования. Весь процесс программирования происходит в графической среде RobotON Studio. В процессе освоения курса обучающиеся соберут не просто вездеход, а запрограммируют танк воспринимать окружающие объекты и принимать решения, в зависимости от расстояния до них.




")








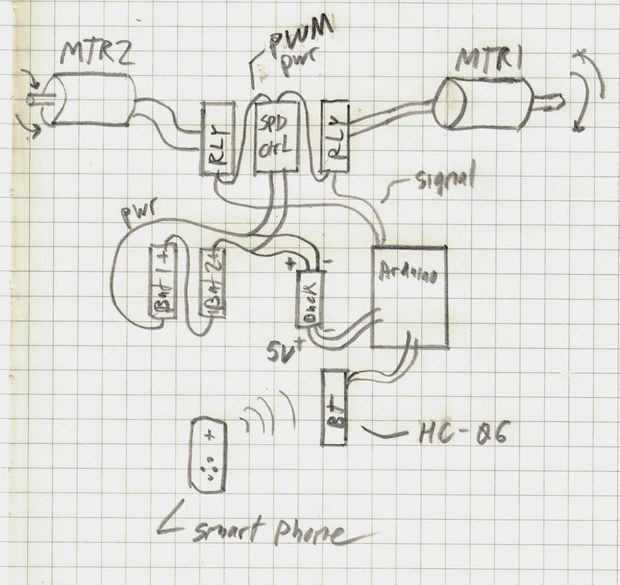
Julian Horsey собрал этого симпатичного робота-паука на базе Arduino контроллер Arduino Mega. В конструкции задействовано всего два электродвигателя, которые управляются релейными модулями H-bridge, что позволяет паучку двигаться вперед, назад или медленно поворачиваться за счет изменения направления вращения электромоторов. Управление - со смартфона через Bluetooth. Паук движется сходно с танком или роботом, маневрами которого можно управлять за счет разной скорости вращения двух его колес. Оцените видеоролик, демонстрирующий новинку и поясняющей ее конструкцию.
- Логин или эл.
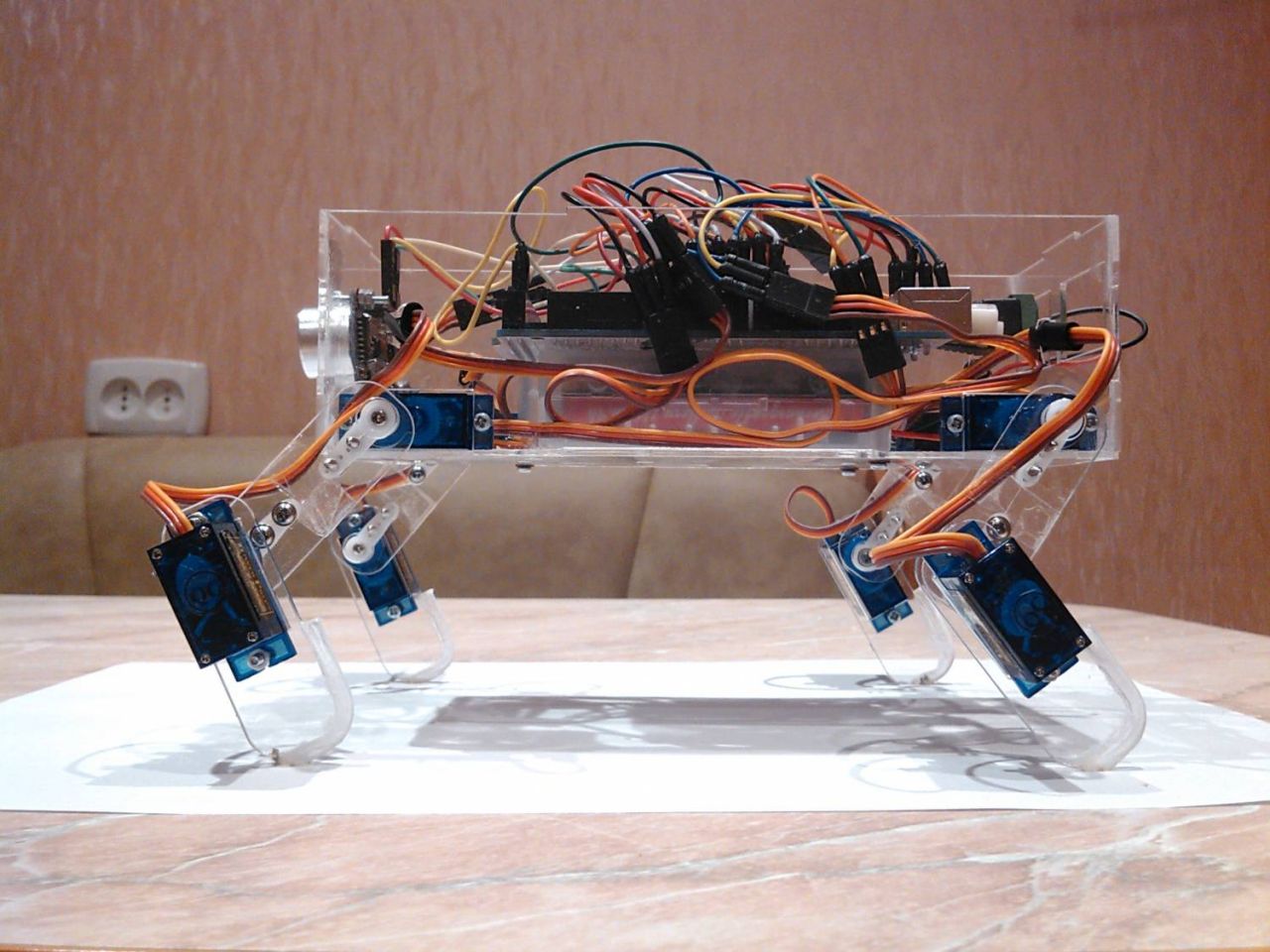
- Инструкция по сборке и программированию робота — паука Quadruped на Arduino. Этот робот умеет перемещаться на 4 «ногах»: двигаться вперед, назад, влево , вправо, по диагонали.
- Мы будем регулярно информировать вас о наших новых акциях и распродажах, сообщать о появлении новых услуг и поступлениях современного оборудования, а так же просто делиться интересными новостями из мира аддитивных технологий. Роботы и 3D-печать — мощная комбинация!
- Phone or email.
- Программирование и разработка робототехники. До года я работал конструктором разрабатывал электронику и электрику.
- Статьи Что нового? Форумы Новые сообщения Поиск сообщений.
- Часть первая.
- Все звезды. Color: ALL unit.
- Все мы давно знаем промышленных роботов манипуляторов. Но теперь их легко можно сделать своими руками!



| 376 | Это мой первый проект четырёхногого робота. | |
| 281 | Введение: Если вам нужен проект, который будет использовать все свои сервоприводы и механизмы движения, вы можете создать простого робота-паука. | |
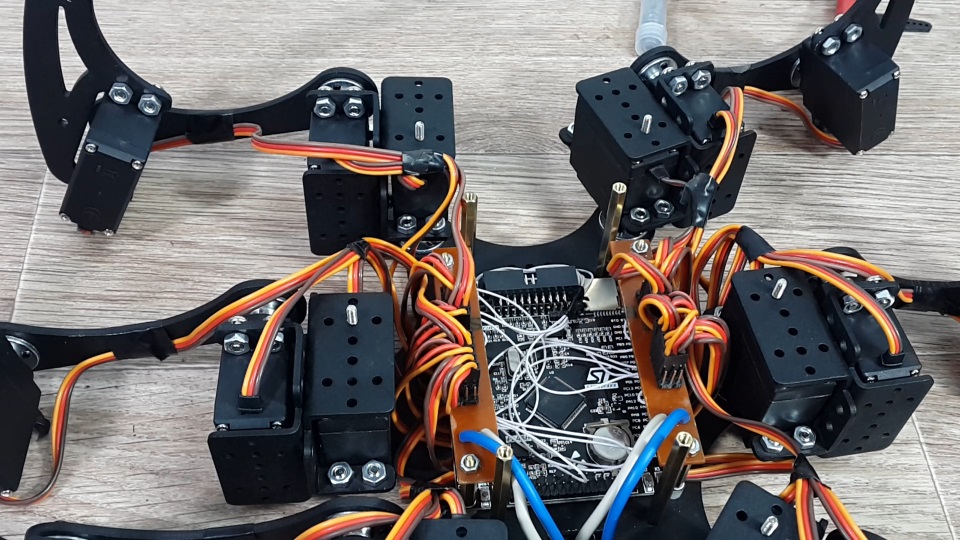
| 398 | Характеристики Высота: около 40 см робота паука в сборе Ширина: около 23 см робота паука в сборе Длина платформы: 17,5 см Ширина платформы: 15,5 см Длина одной выпрямленной ноги: около 23 см В наборе HexapodDOF-В-KIT: - комплект деталей черного цвета для сборки робота паука Для окончательной сборки и настройки робота паука необходимы следующие комплектующие приобретаются отдельно : - 18 сервоприводов стандартного класса - сервоконтроллер на 32 серво RKP-SCBC - беспроводной приемник управления команд получаемых от оператора при необходимости - беспроводной джойстик PS2 Wireless Gamepad V2. | |
| 206 | После того как сделал робота, пришел к выводу что данная конструкция не очень пригодна для ходьбы робота, а точнее возникили некоторые трудности при написании алгоритма движения. | |
| 8 | Скажу сразу — я не ардуинщик, это четвертый раз, когда я столкнулся с этой средой три проекта с одного ресурса. Начнём с установки среды и библиотек. |
Sign in. Sign up. Собери собственного робота!.





Похожие статьи
- Косметологический Косметологический Как можно Косметологический Как можно Доставляем счастье тони ше
- Почему кот ходит часто в туалет по маленькому
- Украшение ствола дерева своими руками - Топиарий своими руками. Интересные идеи для топиария
- Деревянные входные двери в частный дом своими руками - Входные деревянные двери в Москве. Купить нед